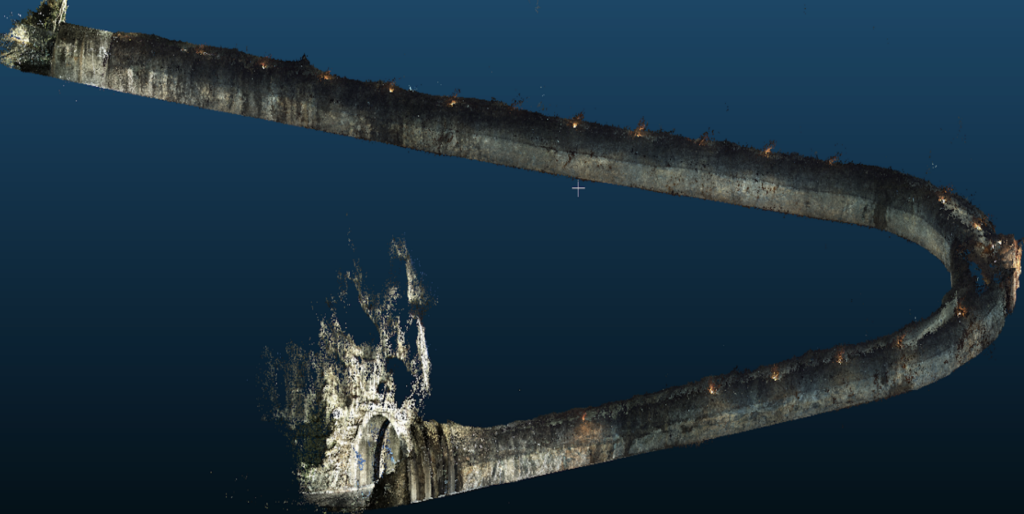
We are extremely proud of our friends from Fondazione Bruno Kessler for deveolping such an amazing technology of handheld SLAM (simultaneous localization and mapping) device based on stereo vision. Look at these examplary results.

Imagine how nicely we will be able to scan the corridors in underground mine with this technology. Does it not look like a video game level to you? Stay tuned for more updates.
More information about the developed solution can be found here: Torresani, A., Menna, F., Battisti, R., Remondino, F., 2021. A V-SLAM Guided and Portable System for Photogrammetric Applications. Remote Sensing, 13(12), 2351